在前一篇文章中,我使用 Tinker Board 和 ATGM336H GPS/北斗模块自建了 NTP 服务器,以 GPS 作为时间基准。GPS 模块除了提供传统的串口输出 NMEA 语句之外,还额外提供了一个 PPS 信号,这个信号会每秒变化一次。原本 gpsd 需要不断解析 GPS 模块传来的 NMEA 语句,需要耗费不短的时间,并且容易被其它程序抢占运行时间,产生 delay(延迟)和 jitter(波动)。而 PPS 信号可以直接触发 CPU 的中断,运行一个简单的处理程序,让操作系统以高优先级处理,不会被其它程序影响。
一般而言,在 Linux 中,PPS 由内核直接提供驱动支持。但是在前文中,由于 Tinker Board 的 Armbian Linux 内核没有提供 PPS 支持,所以我们没法直接开启。
解决方法 1:重新编译内核
如果内核没有对应支持,那就重新编译内核,加上功能就好。
Tinker Board 论坛上的这篇帖子中提供了一个内核补丁,为内核加上了 PPS 支持。打上补丁、编译内核后,将 PPS 信号连到第 22 针,就可以使用了。
但是由于 Armbian 重新编译内核的过程比较复杂(需要指定的操作系统(Ubuntu 18.04),交叉编译环境等等),而且似乎不能打成 deb 包(容易被后续系统更新覆盖),所以我不打算这么做。我选择了另一种方法:
解决方法 2:使用用户态程序
如果内核中不提供支持,那就可以用用户态的程序解决。https://github.com/flok99/rpi_gpio_ntpd 这个程序就可以读取指定针脚上的信号,并且发送给 ntpd 用于授时。
但是用户态程序有一个问题:它和 gpsd 一样,容易被其它程序打断,影响准确度。为了解决这个问题,这个程序在启动时,会将自己设置成实时调度(SCHED_RR)。简单来说,实时调度下的程序拥有最高的优先级,永远第一时间响应事件,并且(几乎)永远不会被打断。
又有一个问题出现了:我在编译了这个程序尝试运行时,出现了
sched_setscheduler() failed: Operation not permitted 这个错误,而我已经是以
root 用户运行。经过查找,发现 Docker 会使用 cgroup 功能,而 cgroup 会与此处优先级设置出现冲突。具体信息可以查看 StackOverflow 上的这篇帖子 和 RedHat
Bugzilla 上的这篇讨论记录。
总之,解决方案就是,让程序启动时不要自己将自己设置成实时调度。在程序启动后,将程序加入主要 cgroup 中,再修改优先级。具体的操作可以在 https://github.com/xddxdd/rpi_gpio_ntpd/blob/master/systemd/rpi_gpio_ntp.service 看到,修改后的程序也可以在 https://github.com/xddxdd/rpi_gpio_ntpd 这里获得。
如果你不用 Docker,也可以直接使用原版程序。
下载程序后,直接 make && make install 安装,然后在 /etc/default/gps0 中,将
ORIG_DEVICE 设置为对应的串口,我用的是 ttyS1:
ORIG_DEVICE="ttyS1"
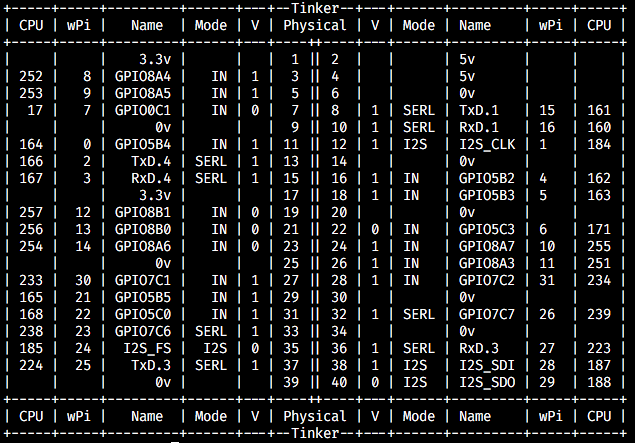
然后在 /etc/default/rpi_gpio_ntp 中设置 GPIO 针脚,此处 171 对应 Tinker Board
上的 22 针,具体对应关系可以运行 gpio readall 查看:
# Configuration file for rpi_gpio_ntp.service
# Shared memory segment to communicate on
SHMSEG=1
# GPIO pin to listen on
# 4 for Adafruit Ultimate GPS HAT for Raspberry Pi
GPIO=171
# Other options, if any
OPTS=
随后启动 PPS 程序:
systemctl enable gps0 rpi_gpio_ntp
systemctl start gps0 rpi_gpio_ntp
在 /etc/ntp.conf 中加入 PPS 配置:
# PPS reference
server 127.127.28.1 minpoll 4 maxpoll 4 prefer
fudge 127.127.28.1 refid PPS
重新启动 NTP 服务:
systemctl restart ntp
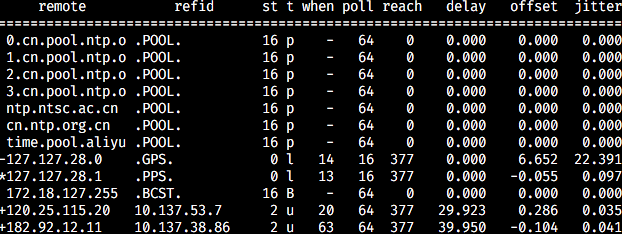
然后运行 ntpq -pn 就可以看到 PPS 了,它的 jitter(波动)特别小: