Docker 镜像中存储的,可以看作是一个个小型 Linux 系统。它们大都以 Debian、Ubuntu 或是 Alpine 作为基础,再在上面安装额外的软件而成。 以完整的 Linux 作为基础的好处就是镜像中会自带常用的命令( ls , cat 等),在镜像构建过程中常常用到。另外它们也带有完善的包管理机制,简单使用 apt-get 就能装好软件,做出一份能用的镜像。但当镜像做出之后,上面这些工具就用不到了,占用了不必要的磁盘空间。另外,完整的操作系统也会带有 SystemD、OpenRC 等管理后台服务的程序,而 Docker 容器常常只用来运行一个程序,后台管理程序就多余了。 虽然 Docker 镜像采用分层设计,将基础的系统镜像(例如 Debian)和上层修改(例如安装的 nginx)分开存储并进行去重,从而减少了重复的空间占用,但没有完全解决问题。例如假设我先基于 Debian 构建了一个镜像 A,过了一个月又构建了镜像 B。但在这一个月中,Debian 的基础镜像进行了升级,...
未雨绸缪:使用后量子时代的加密算法
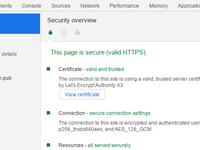
现代互联网上,绝大多数网站都已经支持 HTTPS,其使用的 SSL/TLS 加密协议会将用户的请求数据与网站的响应进行加密,以防止信息被路径上的恶意用户窃取或篡改。而 SSL/TLS 协议中的一个重要组成部分是 RSA、ECDSA 等 非对称加密 算法,这些算法的密钥分为 公钥、私钥 两份,公钥可以公开,而私钥则要妥善保管。 在访问 HTTPS 网站时,会经过以下的流程: 网站会将它的 公钥 (以证书形式)发送给浏览器。 浏览器会校验公钥的有效性,防止中间人篡改公钥,从而拦截或监听通信。 浏览器(或操作系统)内置了一组可信任的证书颁发机构(CA)的公钥,通过密码学方法可以确认这份公钥是其中某个颁发机构生成的。 证书颁发机构则会通过一系列方法(多级证书链,物理隔绝的密钥保存设备)来保护他们自己的私钥安全,防止有人窃取他们的私钥来随意生成被信任的证书信息。 浏览器会与证书颁发机构的服务器联系,查询「证书吊销列表」(Certificate Revocation List)。...
自建 DNS 根服务器
随着近期中美对抗的不断升级,国内的部分社交平台上出现了一种担忧,担心美国切断 DNS 系统的根服务器到中国大陆的网络连接,或者在 DNS 根服务器中删除中国的域名记录,从而破坏中国的互联网。 目前已经有很多分析,说明这种情况不太可能出现,大都从以下两种观点出发: DNS 根服务器使用 Anycast 来广播 IP,中国大陆境内实际上是有根服务器的,不会受到关停影响; 从经济/政治上,美国切断 DNS 根服务器对他们自己的弊大于利。 而今天我会从另一种观点出发: 你可以在短时间内自己搭建一个 DNS 根服务器,并且让你的递归 DNS 使用它。 是的,要自己搭建的 DNS 根服务器和目前作为互联网基础服务的 DNS 根服务器在功能上是等同的。 本文更新日志 2020-10-01:处理根 DNS 记录时,把 DS 记录也保留,以更好支持开启了 DNSSEC 的递归解析服务器。 2020-09-05:初始版本。 DNS 解析原理 我们首先回顾下 DNS 解析的流程: 你打开电脑,输入 https://www.lantian....
制作一个优雅的平安经生成器
由于本文内容与所用语言有关,中文、英文版内容有少许差异。 《平安经》简介 《平安经》由(前)吉林公安厅党委副书记、常务副厅长贺电所作,书中内容只是句式「XXX 平安」的简单重复,但书籍售价很高。因此公众质疑本书的出版和出售有索贿嫌疑。 《平安经》的内容格式如下:(来自 维基百科 ) 「眼平安,耳平安,鼻平安」 「上海港平安、深圳港平安、宁波舟山港平安、广州港平安」 「初生平安、满月平安、百天平安、1岁平安、2岁平安、3岁平安」 「孟加拉湾平安、墨西哥湾平安、几内亚湾平安」 我一看到这个格式,就发现它很适合做标签云。那么就让我们开始吧! 最简单的版本 我用的是 Hexo 静态网站系统,只要在主题的 layout 文件夹下新建一个 ping-an-jing.ejs 模板文件,然后在合适的地方插入如下代码: <% site. tags . forEach ( tag => { %> < a href = "<%- url_for(tag.path) %>" > <%= tag....
Bird 配置 BGP Confederation,及模拟 Confederation(2020-06-07 更新)
更新记录 2020-10-01:添加警告,模拟 Confederation 时不能在内网滤掉内部 ASN 2020-06-07:添加 Bird Confederation 的局限,及模拟 Confederation 方法 2020-05-17:最初版本 ISP 内部 BGP 互联方案比较 互联网中各个 ISP(互联网服务提供商)绝大多数都使用 BGP 协议互相交换自己的路由信息。每个 ISP 都会从所在区域的网络信息中心(NIC,例如 APNIC,RIPE)获得一个 ASN(自治域编号),例如中国电信的 ASN 是 4134。然后 ISP 之间通过物理连接(铜缆,光纤,卫星网络等)连接各自的边界路由器,然后在边界路由器上配置 BGP 协议,告诉对方:「我是 AS4134,我这里可以访问到 202.101.0.0/18 这个 IP 段」。与中国电信相连的 ISP 的路由器会接力把这条消息广播下去:「我是 ASXXXX,我距离 202.101.0.0/18 有一格距离」,以此类推。各个 ISP 的路由器就会根据到目标的距离等参数,把数据包发送到对这个路由器来说最优的目标。 (注:以上内容经过简化,...
x32 ABI 及相应 Docker 容器使用
x32 架构是怎么回事呢?x86、x86_64 架构相信大家都很熟悉,但是 x32 是怎么回事呢,下面就让小编带大家一起了解吧。 x32 架构,其实就是 x86 和 x86_64 架构拼在一起,大家可能会很惊讶 x86 和 x86_64 架构怎么会拼在一起呢?但事实就是这样,小编也感到非常惊讶。 x86 及 x86_64 的历史,以及 x32 ABI 我们现在使用的个人计算机及服务器绝大多数都使用 x86_64 架构,该架构由 AMD 于 2000 年发布规范,2003 年发布第一块处理器。x86_64 是一个 64 位的架构,意味着在 x86_64 中,CPU 的每个寄存器都能保存 64 bit 的数据(即 8 个字节)。在 x86_64 流行之前,多数电脑都使用 Intel 处理器以及相应的 x86 架构/指令集,这是一个 32 位的架构,每个寄存器可以保存 32 bit 的数据(即 4 个字节)。 64 位架构的一个显著好处是内存寻址能力的提升。计算机在访问内存时通常按照这样一个流程:将要访问的内存地址写入寄存器,...
写一个简单的 Telegram 机器人
应 DN42 Telegram 群 群友的要求,我打算给我的 Bird Looking Glass 加上 Telegram Bot 的支持,方便群友现场查询 Whois、测试网络通断、检查 漏油 路由泄漏源头等。这个 Bot 要能识别以斜线 / 开头的命令,然后对命令消息进行回复。 我的 Looking Glass 使用 Go 语言写成,因此我一开始先查找了 Go 语言的 Telegram Bot API。但流行的 API 库无一例外都遵循了同样的请求结构: Telegram 服务器发送一个回调到自己的服务器; 自己的程序处理请求,期间可能根据本地配置的 Token 向 Telegram 服务器多次主动请求; 自己的程序最终主动请求 Telegram 服务器,发送回复信息。 这套方案功能强大,但有点复杂,而多余的功能我根本用不上。我更希望使用 Telegram 官方提供的另一种方式 ,直接回复回调 HTTP 请求的方式: Telegram 服务器发送一个回调到自己的服务器; 自己的程序处理请求后,直接以 HTTP Response 方式回复回调请求,执行操作。...
Docker 容器共享网络命名空间,集成 Bird 实现 Anycast 高可用
正好一年前,我 在 DN42 网络内用 Docker 建立了 Anycast 服务 。当时我的方法是,自定义容器的镜像,在其中安装一个 Bird,然后加入 OSPF 协议的配置文件来广播 Anycast 路由。但是随着时间推移,这套方案出现了以下问题: 安装 Bird 本身是个较花时间的过程。我的 Bird 不是用 apt-get 装的,因为 我的 Dockerfile 需要支持多种 CPU 架构 ,而 Debian 有些架构的软件源里没有 Bird。而又因为我的构建服务器是 AMD64 架构, 使用 qemu-user-static 支持其它架构的镜像运行 ,为其它架构制作镜像、编译程序时就涉及到大量的指令集翻译,效率非常低。构建一个镜像在不同架构下的版本可能需要 2 小时以上,而安装应用本身的 apt-get 流程只需要几分钟。 自己定制镜像也比较花时间。因为容器中需要同时运行目标应用(例如之前的 PowerDNS)和 Bird,就不能直接把目标应用作为 ENTRYPOINT 了,...

使用 PowerDNS 的 Lua 功能自建分地区解析 GeoDNS
之前,如果要为自己的网站自建权威 DNS 系统,那么(几乎)唯一的选择是 PowerDNS 加上它的 GeoIP 后端。但是 GeoIP 后端使用的是 YAML 格式的配置文件,不能与 MySQL 等数据库一同使用。这意味着必须手动配置一套跨服务器同步文件的系统,而不能使用更为成熟的数据库同步技术。 不过,PowerDNS 在最新的 4.2 版本中加入了 Lua 记录的支持。Lua 是一种专门用于「嵌入其它程序执行功能」的编程语言,你或许曾经在 nginx 上看到过它(作为一个插件)。Lua 记录支持使得 PowerDNS 可以根据用户查询请求的不同来返回不同的回答,分地区解析 GeoDNS 功能也就可以实现了。 更新 PowerDNS 最新的 PowerDNS 4.2 版本没有加入 Debian 10 的软件仓库中,你需要从 Debian Unstable 的软件仓库下载。但是由于 PowerDNS 依赖了一大堆新版的库文件,其中包括系统运行必须的库文件,...
学校网络中自建 VLAN,低价实现高速私有内网
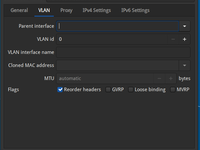
和全国大多数高校一样,我所在的大学以「一人一账号」的方式提供网络。通过有线网络或者 Wi-Fi 联网时,所有请求会被暂时重定向到一个登录界面(即 Captive Portal),输入用户名密码后才可以访问互联网。这个做法也是大多数公共场所(例如机场,咖啡厅)的标配,对于电脑、手机等设备也还算友好。但是一些不带显示屏的设备(例如树莓派,ESP8266 等)就难以访问网络了。 对于树莓派、ESP8266 等可以运行自定义代码的系统,可以模拟提交表单来登录网络,但是一旦模拟提交表单的程序出现问题,你就得手动将设备取下来,连上自己的电脑上传新的登录程序,这一过程非常的麻烦。至于其余只能运行预定程序的智能设备就完全无法联网了。由于我并没有智能台灯等设备,本文暂时只考虑可以运行 Windows、macOS、Linux 三大操作系统之一的智能设备,包括电脑及单板计算机(Single Board Computer)。 另外还有几个小问题: 我的寝室里只有一个网络端口供我使用,...